Kopf- und Heck-Hydraulikhub-Flip-Servo-Schweißpositionierer für Roboter
Beschreibung
Basisinformation.
| Modell Nr. | BWJ-5T |
| Höhe der Spindelmitte | Maßgeschneidert |
| Steuermodus | CNC |
| Servomotor | 4 kW |
| Vorlaufzeit | 30 Tage |
| Farbe | Maßgeschneidert |
| Hebemodus | Hydraulischer Hebe-Schweißpositionierer |
| Rotationsreduzierer | RV450e (Verhältnis: 171) |
| Drehgeschwindigkeit | Maßgeschneidert |
| Stoppposition | Frei |
| Fahrmodus | Servo |
| Durchmesser des Positioniertisches | Maßgeschneidert |
| Stellungsreglertyp | 2-Achsen-Schweißpositionierer |
| Flip-Geschwindigkeit | Maßgeschneidert |
| Funktion | Roboterschweißpositionierer |
| Transportpaket | Hölzern |
| Warenzeichen | Lemar |
| Herkunft | Wuxi, China |
| HS-Code | 8428909090 |
Produktbeschreibung
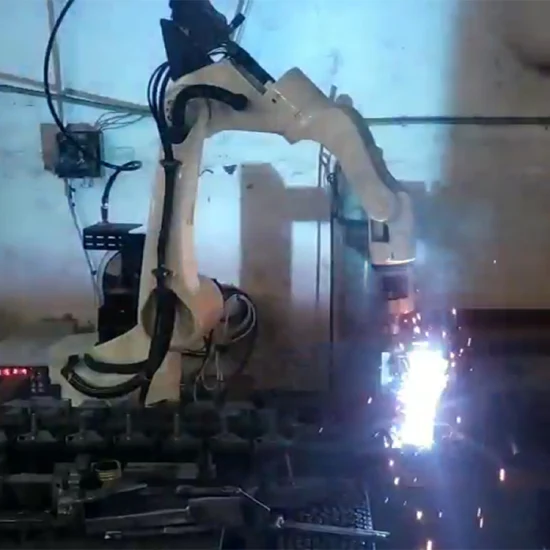
Der Schweißpositionierer ist eines der Schweißhilfsgeräte mit einem sehr breiten Anwendungsspektrum im Schweißbereich im In- und Ausland. Basierend auf langjähriger Erfahrung im automatischen Schweißen und CNC-Schneiden verfügt der von der Firma Lemar entwickelte und konstruierte Schweißpositionierer hauptsächlich über die Funktionen Drehen und Wenden. Durch Drehen kann der automatische Schweißpositionierer das zu schweißende Werkstück in bester Schweißqualität herstellen Position und die Drehfunktion können die automatischen Schweißfunktionen des Werkstücks wie Rundnaht-Argonlichtbogenschweißen, Unterpulverschweißen und Schutzgasschweißen realisieren.
Schweißpositionierer können unterteilt werden in:
1. Einachsiger Kipppositionierer (einstellbare Kippgeschwindigkeit, verwendet mit Schweißpositionierer-Spannvorrichtung)2. Einachsiger Cantilever-Positionierer (einstellbare Drehgeschwindigkeit, verwendet mit Schweißpositionierer-Spannvorrichtung)3. Einachsiger horizontaler Rotationspositionierer (um eine horizontale Drehung von ±180° zu erreichen)4. Doppelachsiger Standardpositionierer (servobetriebener Positionierer)5. L-Typ-Doppelachsen-Positionierer (Servoantrieb) (um das Umdrehen und die horizontale Drehung um ±180° zu realisieren)6. Dreiachsiger vertikaler Flip-Positionierer7. Dreiachsiger horizontaler Drehpositionierer (ausrüstbar mit Klemmen)8. Fünfachsiger Positionierer mit Servoantrieb
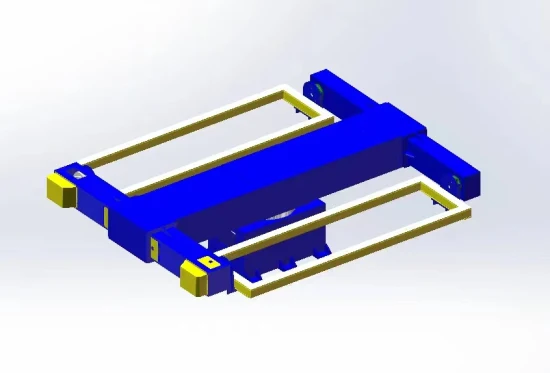
Spezifikation des TWJ-5T Robot 2-Achsen-Schweißpositionierers:
| NEIN. | Name | Spezifikation | Notiz |
| 1 | Geräteabmessungen | 4500 mm * 700 mm * 800 mm | Maßgeschneidert |
| 2 | Höhe der Spindelmitte | 700 | Maßgeschneidert |
| 3 | Belastbarkeit der Ausrüstung | 5000kg | |
| 4 | Spinngeschwindigkeit | 0,1-2 U/min | Sonderformteile können durch Verbindungswerkzeuge verbunden werden |
| 5 | AC-Servomotor | 4KW | Servomotor |
| 6 | Rotationsreduzierer | RV450E (Verhältnis: 171) | Genauigkeit 1 Bogenminute |
| 7 | Schwenkunterstützung | 011.30.500 | |
| 8 | Base | Maßgeschneidert und Endbearbeitung nach dem Schweißen | |
| 9 | Elektronische Steuerung | SPS-Steuerung | Elektronische Steuerung |
Merkmale des automatischen Kopf- und Heckrahmen-Schweißpositionierers, der mit dem Zylindertankroboter verwendet wird:
1. Stabilisieren und verbessern Sie die Schweißqualität und stellen Sie ihre Gleichmäßigkeit sicher. Beim Einsatz des Roboterschweißens sind die Schweißparameter jeder Schweißnaht konstant und die Qualität der Schweißnaht wird weniger durch menschliche Faktoren beeinflusst, was die Anforderungen an die Bedienfähigkeiten der Arbeiter verringert. Daher ist die Schweißqualität stabil. Beim manuellen Schweißen ändern sich die Schweißgeschwindigkeit, die Trockendehnung usw., sodass es schwierig ist, eine gleichmäßige Qualität zu erreichen.2. Verbessern Sie die Arbeitsbedingungen der Arbeiter. Roboterschweißarbeiter werden nur zum Be- und Entladen von Werkstücken eingesetzt, fern von Schweißlichtbögen, Rauch und Spritzern usw. Beim Punktschweißen tragen die Arbeiter keine umständlichen manuellen Schweißzangen mehr, was die Arbeiter von schwerer Handarbeit befreit .3. Verbessern Sie die Arbeitsproduktivität. Der Roboter ermüdet nicht und kann 24 Stunden am Tag ununterbrochen produzieren. Darüber hinaus kann der Einsatz von Roboterschweißen durch den Einsatz von Hochgeschwindigkeits- und Hochleistungsschweißtechnologie die Effizienz deutlicher verbessern.4. Der Produktzyklus ist klar und die Produktausgabe lässt sich leicht steuern. Der Produktionszyklus des Roboters ist festgelegt, sodass der Produktionsplan sehr klar ist.5. Dadurch kann der Zyklus der Produktmodifikation und des Produktaustauschs verkürzt und die entsprechende Ausrüstungsinvestition reduziert werden. Es kann eine Schweißautomatisierung für kleine Produktserien realisiert werden. Der Unterschied zwischen einem Roboter und einer Spezialmaschine besteht darin, dass er das Programm ändern kann, um es an die Produktion anzupassen unterschiedlicher Werkstücke.
Prev: Uesd für Overhead-Service-Anwendung für Straßenbeleuchtung
Nächste: Fz1200r12HP4 Infineon IGBT mit Soft
Unser Kontakt